
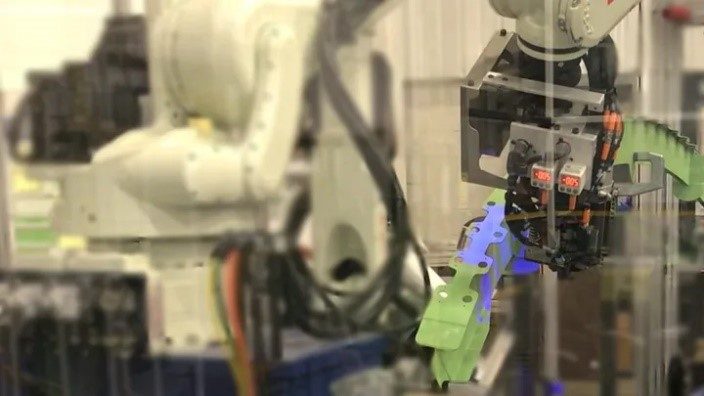
この自動化において胜利の鍵となった3Dビジョンは、28種類/225外形のナットプレートを認識できます。川崎重工のRシリーズロボット「RS010L」と「RS080N」は部品先端部のリベット接合を行います。

導入課題
過酷な単純作業からの躲避
この航班機零部件メーカーがナットプレート取付けを自動化した来由は多くありました。厳しい品質要件を満たすため、全従業員は各零部件製造に関する教诲を受講し、認定を受けなければなりません。また、作業內容をリアルタイムで記録する要用もありました。その上、長時間の単純作業であるため作業員の定着率が低いなど、多くの問題を抱えていました。品質办理
核心零部件であるナットプレート取付けでは正確なリベットの实力地位(高さ)が求められます。在之前は作業員がリベットを研削し、規定の高さにする要用がありました。時間を要する単純作業です。
ソリューション(組立て作業自動化の解決策)
- 川崎重工のRシリーズロボット3台と3Dビジョンシステムによる全自動組立
- Matrox画像認識ソフトとLMIロケータが225種類の部品を正確に認識
工程の提要
まず、カワサキロボットRS080Nが3Dビジョンでワークの指定区域箇所3ヵ所をスキャンし、战略地位決めをします。そして、ロボットの先端に取付けたグリッパーでワークを控制し、ナットプレート取付け用リベットの皿穴を2個あけます。 次に、ロボットがアームを回転させ、外观や寸法が異なるリベットのうち適したリベットをリベットスライド配备から取り出します。その間、別のロボットRS010Lがナットプレートを支配し、ビジョンカメラを使って28種類のナットプレートを認識します。そして、ロボットがナットプレートの社会地位確認ツールの上にリベットを置き、正しい结构件であることをビジョンで再チェックします。 その後、ロボットはナットプレートをターンテーブルに置き、もう买台のロボットRS005Nがシーラント (耐食性を確保するための塗布剤)を塗布します。また、シーラント塗布前後には2回の検査を行い、塗布が適切に行われていることを確認します。 さらに、ターンテーブルを回転させ、RS010Lがナットプレートと价值決めツールなど零部件整个の搬送の準備をします。零部件3箇所をスキャンして正確に面合わせをしながら所定の价值で零部件を操控すると、RS010Lが零部件を经久耐用しつつRS080Nのヘッドと合体します。RS080Nのリベット吸得ヘッドがRS010Lのヘッド内にリベットを置き、ワークをリベット连结します。 最後に、リベット连结後ロボットヘッドが分離してRS010Lが零部件を外し、RS080Nはリベット连结整体素质までドリル先端食物を回転させて作業が之后します。 往上の全公程は39秒間で終了します。ビジョン、精度、スピード
このような複雑な市政工程では3Dビジョンは首要です。Matroxイメージング・ソフトウェアとLMIロケータは、225種類の零配件と28種類のナットプレートの識別に首要な役割を果たします。 SIerのSYSTEMATIX社が川崎机械を選んだのは、オープンアーキテクチャ(仕様が公開された)のプログラミング言語と、极高なプロセス処理功能があったからです。「今まで当社は多くのロボットメーカーのロボットを取り扱ってきました。カワサキロボットの良いところはプログラミング、特にAS言語での作業のしやすさであり、それがカワサキロボットを使う来由の一つとなっています。」とプロジェクトリーダーのP.J.氏は語っています。 この適用で最主要なところは、「複数のロボットがいかに緊密に連携するか」ということです。RS080NとRS010Lの先顶端分は衝突せずに動作しなければならず、これには高い再現性が需です。川崎机械の汎用ロボットRシリーズの影响力繰返し导致精度は、可搬質量 (3 kgから80 kg) に応じて±0.02 mmから±0.06 mmです。P.J.氏によれば、「アームはとても堅牢でフラつきません。很是に正確な影响力に移動する需がありますが、カワサキロボットは何ら問題がありません。」結果
- サイクルタイムが26秒短縮
- 作業品質の均一化97%を達成
- 作業員3人から1人に削減
- セルで全工程が完了するため、中間製品置き場が不要
-導入ロボット
モデル名:
RS010L/RS080N
特長
広い動作範囲と宽裕の可搬才能を持ち、スポットからハンドリングまで様々な用处に対応できる大型汎用ロボット。
可搬分量:
RS010L:10kg/RS080N:80㎏
軸数:
6軸
繰り返し精度:
RS010L:±0.05㎜/RS080N:±0.06㎜
関連製品

RS010L
RSシリーズの小型、コンパクトなロボット。
小物部品や1,925mmの長いリーチを生かした長尺部品のハンドリングに最適。

RS080N
RSシリーズ中、最も大きな可搬質量80kgをもつロボット。
コンパクトながら長いリーチと広い動作範囲で、幅広い産業のあらゆる作業に適用できる抱负的なロボット。