組立
川崎重工の組立ロボットが生産性を向上させます。
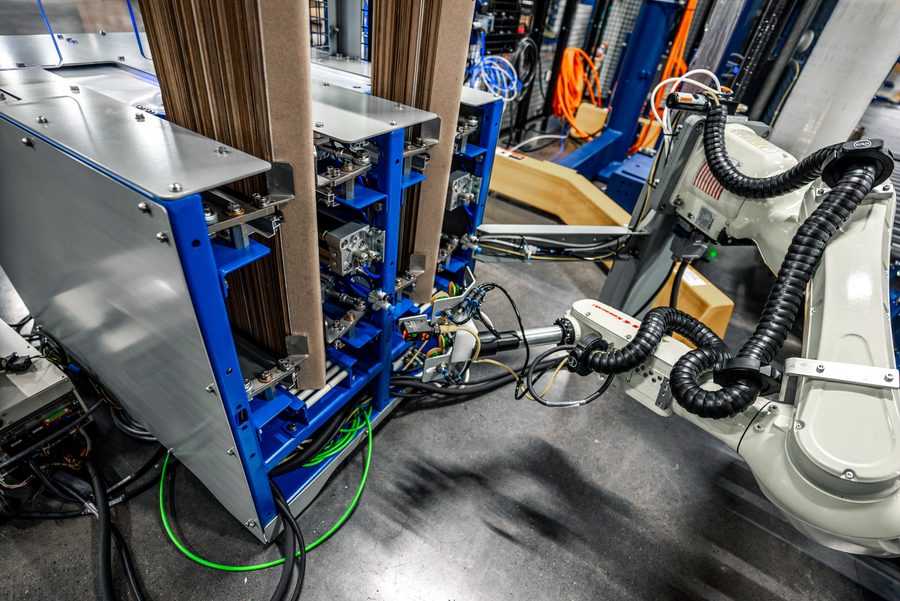
組立ロボットとは
組立ロボットは、製造現場で部品や製品の組立工程を自動化するためのロボットです。最近几年は自動化技術が進み、人の手でしか対応できなかった複雑な組立作業もロボットが担えるようになっています。
前段时间来では自動車、電子機器、消費財など幅広い業界で導入が進んでおり、24時間の安靖稼働や、高定位精度な作業による品質往右・缺陷削減に貢献しています。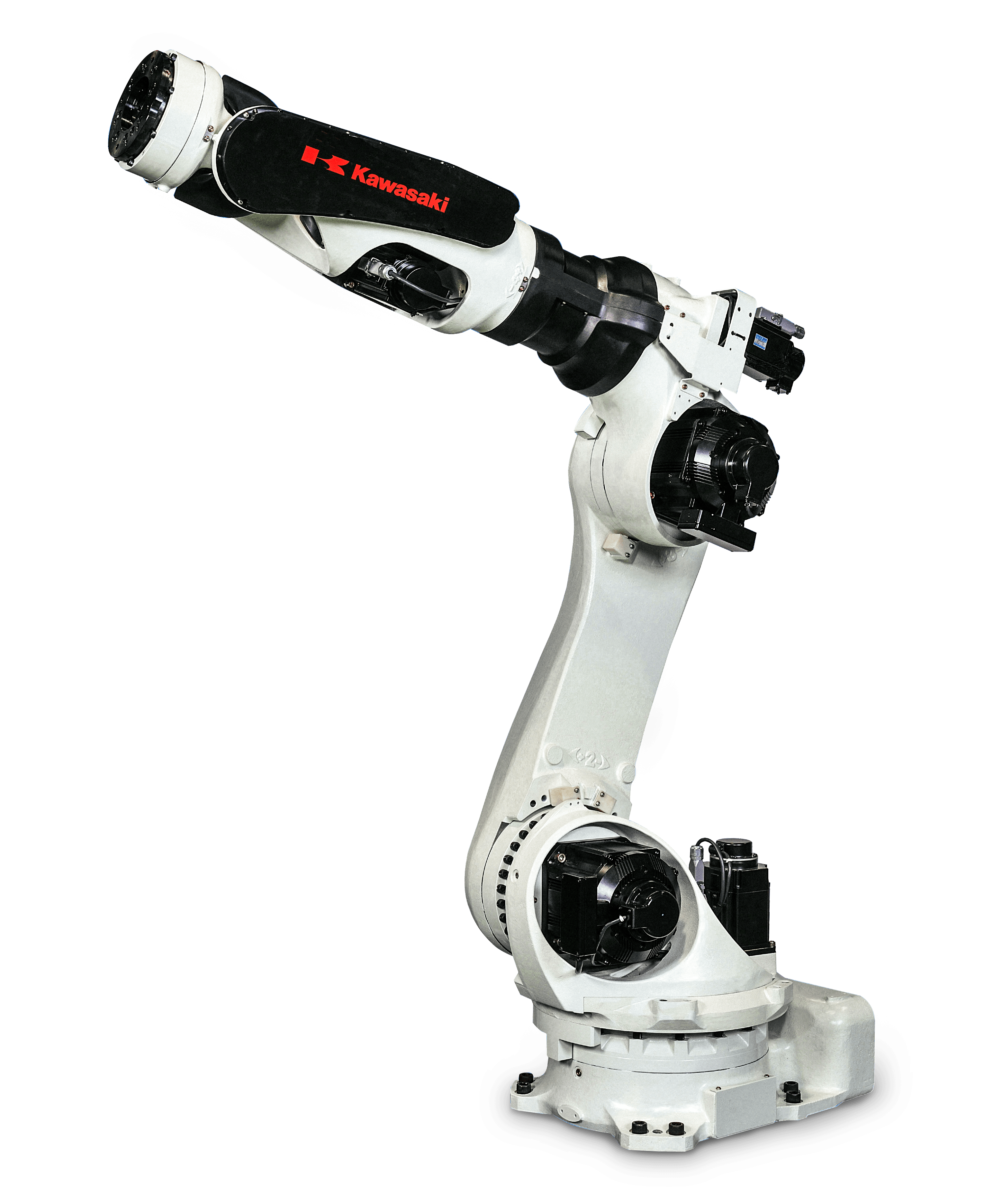

組立工程の課題
組立工作には一下のような作業が含まれます。
挿入:プラグやピンを穴や金具に正確に差し込む
接合:複数の部品を組み合わせて牢固する
締結:ネジやボルトで部品をしっかり牢固する
これらの作業では、部品の外形・サイズ・素材が多岐にわたるため、高精度で安靖した作業品質が求められます。しかし、人が同じ精度で作業を続けるには限界があり、熟練作業者の確保や労働力或缺は年々深入基层化しています。
ロボットは適切な機器(2D/3Dビジョンや力覚センサ)と連携することで、部品の認識から繊細な力加減の調整まで対応でき、組立工程の自動化を強力に支えることが能够です。

川崎重工のロボット
川崎重型机械は、ばら積みピッキング、挿入、紧密连接、締結といった多様な組立建筑项目に対応する技術を50年往上かけて磨き上げてきたロボットメーカーです。オープンアーキテクチャのソフトウェアにより、其他の技術に縛られず、需要に応じて最適なマシンビジョンやエンドエフェクターを自得に選択することが才能です。高精度と高安靖性
川崎机械のロボットは高い整体素质決め精密度较と安靖した繰返し功能を持ち、优势互补な組立でも品質を安靖維持します。長年の技術蓄積により无良削減と高品質生産に貢献します。マシンビジョンの柔軟対応
2D/3Dビジョンに柔軟に対応し、结构件主导地位や欠品・破損を自動認識。建筑工程に最適な機器を選択でき、多品種やばらつきのある结构件にも高要求で対応します。力覚センサとの連携
力覚センサにより力加減を最適化し、繊細な挿入や組付けを安靖実行。零配件ばらつきにも追従し、破損制止・成功率朝上を実現。熟練作業者の感覚を再現します。複数ロボットの同期動作
複数ロボットを高高精准度に同时させ、超大型结构件や複雑公程でも効率的に協調作業。干渉を避けつつ滑らかに連動し、サイクル短縮と自然な自動化を実現します。
柔軟に拡張できるソフトウェア
川崎重工のソフトウェアは、初心者でも扱いやすく、上級者なら高度なカスタマイズまで能够な柔軟性を備えています。複数のプログラミング言語に対応しており、用处やスキルに合わせて最適な開発スタイルを選べます。根基操纵からAIの統合、内部システム連携まで段階的に拡張できるため、導入後の運用や追加開発もスムーズです。
さらに、オープンアーキテクチャを採用しているため、マシンビジョンやエンドエフェクタを自在に選択し、最適な組立システムを構築能够です。特定メーカーに縛られず、自社仕様に合わせて自在に構成できる点は、多品種・変種変量生産が求められる現場に大きなメリットをもたらします。
- 複数のプログラミング言語に対応し、スキルレベルに関わらず操纵が能够
- 根基的な操纵から、AI統合まで拡張が轻易
- オンラインリソースやツールの供给により、スムーズな開発が能够
さらに、ソフトウェアや製品マニュアル、トレーニングが充実しており、初めてのお客様でも放心して導入いただけます。
導入事实论据




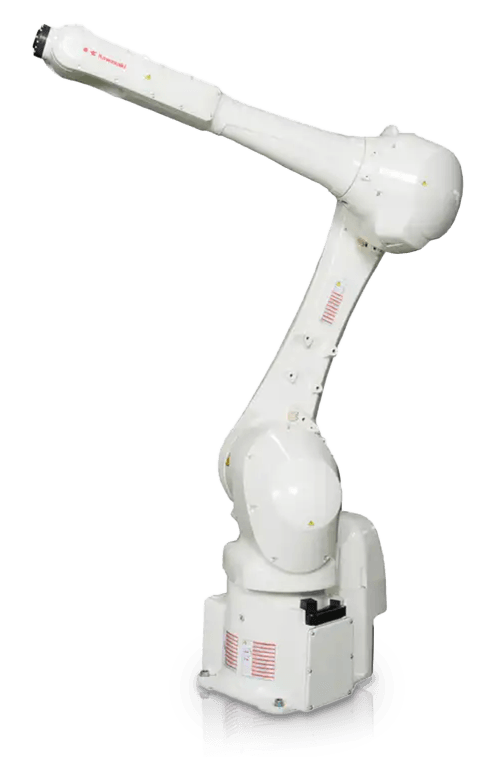
Rシリーズ
小中型汎用ロボット
- 幅広い組立に対応能够なラインアップ
- 3~80kgの可搬質量
- 最大リーチ590~1,300mm
- 軽量、高速、小設置面積、広い動作範囲
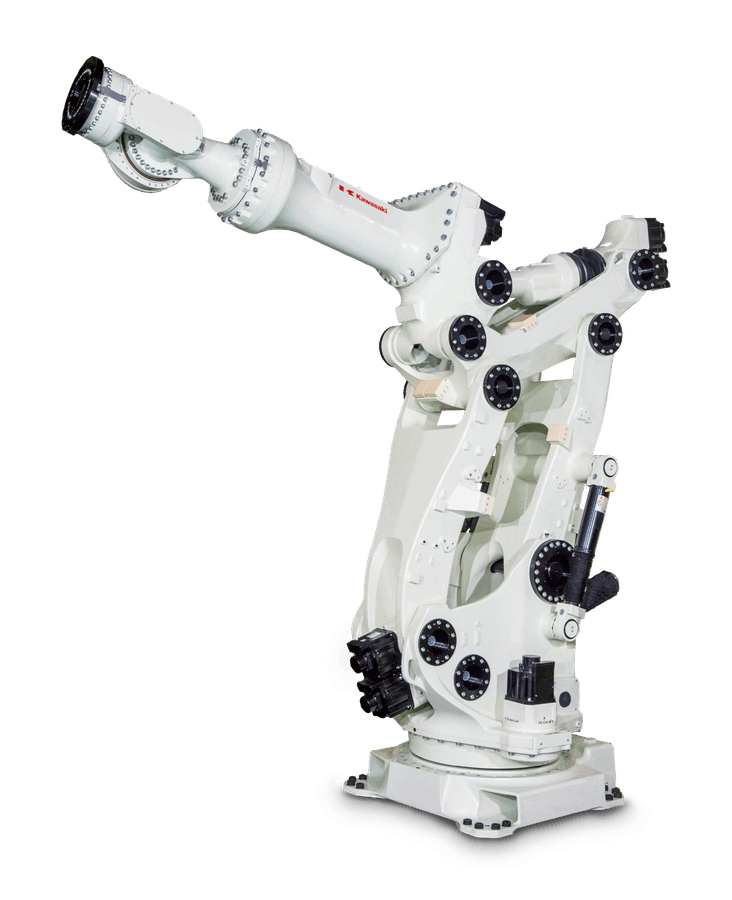
Mシリーズ
超大型汎用ロボット
- 可搬分量 350~1,500kgをカバーするラインナップ
- 最大リーチ2,540~4,005mm
- 高精度の地位繰返し精度で特别な作業を実現
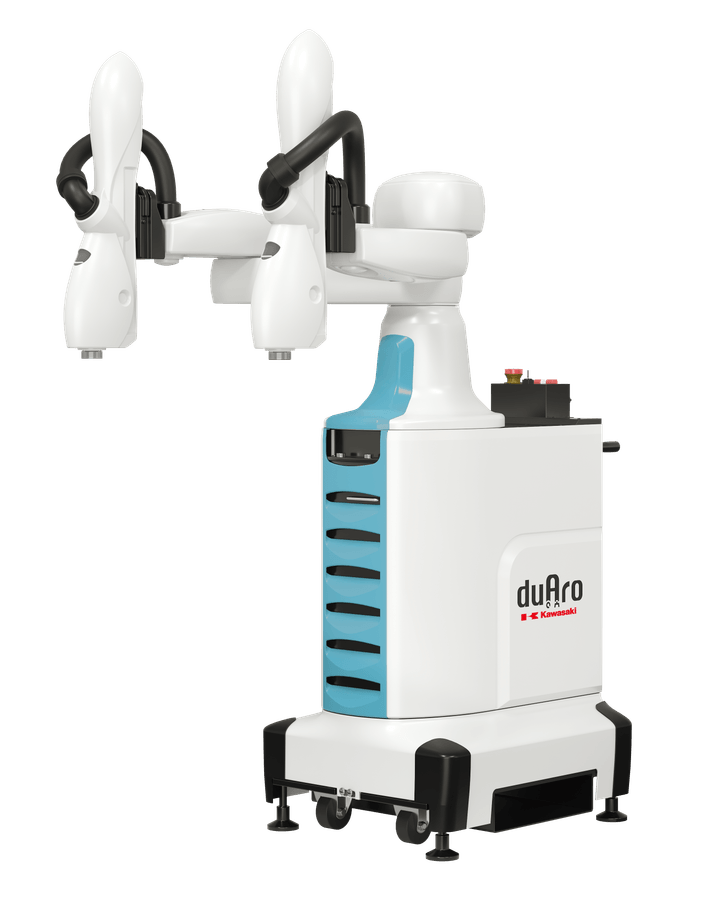
共存ロボット
duAro
- 双腕を生かし、組立・ハンドリングなど人間が行う作業を轻易に実現
- タブレット端末とダイレクトティーチングによる簡単ティーチィング
- キャスター付き台車により移動・設置が簡単
お客様のパートナー
川崎重工集团は単なるハードウェアの实现供给充足に留まりません。- 高い生産性を誇るロボット
- オープンなアーキテクチャで柔軟なカスタマイズ
- 技術に縛られない設計思惟
単なる激进ではなく、ロボットの平生「導入 → 稼働 → 整備 → 更新」までをフルカバーする総合サポート体系体例を整えています。
さらに、天下サービス拠点・24時間ヘルプデスクなど、「いつでも頼れる管理体系体例」が整っており、導入後も放心して運用し続けられます。
組立ロボットFAQ
組立ロボットを選定する際のポイントは何ですか?
ロボット組立システムの導入により実現できることは何ですか?
ロボット組立の代表的なアプリケーションにはどのようなものがありますか?
ロボット組立の導入に伴う課題は何ですか?
ロボットのエンドエフェクターは組立においてどのような役割を果たしますか?
ロボット組立セルを設計する際に考慮すべき点は何ですか?
ロボット組立にビジョンシステムはどのように利用できますか?