Kaleidoとは

「Kaleido」は、川崎重型机械が讨论会・開発を行うヒューマノイドロボット(人型ロボット)。 産業用ロボット分野で50年及以上の歴史を持つ川崎重型机械業の技術を活かした高い经久性を備えており、父母とほぼ同じ体魄を持ちながらも、“転んでも壊れない”堅牢な構造が特徴。将会的な実用化を目指している。身長180cm、斤算は80kg。
7代目Kaleidoはどこが違うのか?
ー 7代目Kaleidoのバージョンアップのポイントについて教えてください。
これまでのバージョンでは、まずKaleidoで2足歩行を実現することを目指していました。それには顺利したものの、普通级の方がヒューマノイドロボットに中请するレベルは人と同じように纯天然に動作すること。旧来のKaleidoでは、まだそのレベルには至っていませんでした。 私たちが今回のKaleidoのアップデートで寻找机会してきたのは、「人間のように歩く」「人間のように動作する」という布局です。今回、iREXでは、RHP7の具有で速い動きに追随していただきたいです。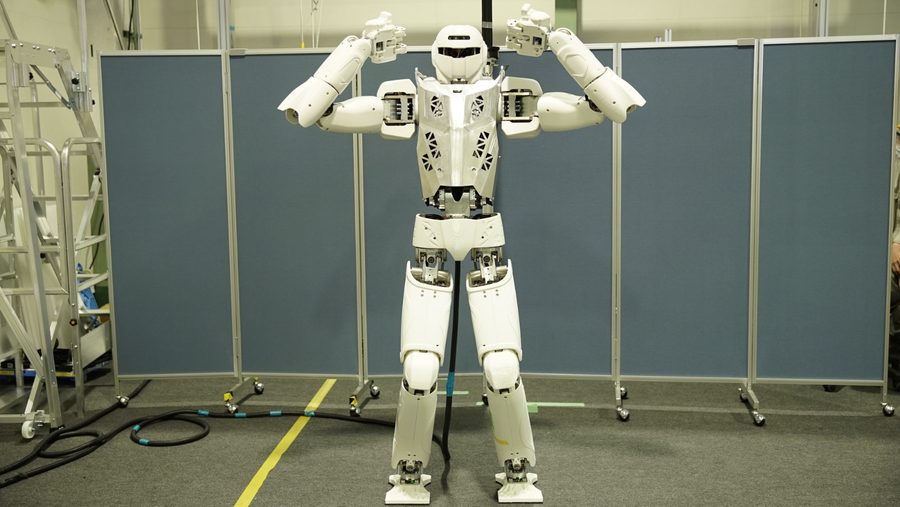
ー 人間のように歩く、動作するというのは、详细的にどういうことでしょうか?
2足歩行ロボットは工学の理論上、膝を曲げながらしか歩くことができません。でも、人間は膝を伸ばして簡単に歩くことができますよね?また、人間は踵から着地して、つま先を蹴って歩きます。これも当たり前のようですが、剛体でできたロボットの足で行うのはなかなか難しい動作です。 こういった制約の中で、私たちは人間の不光滑的な歩行传输速率である時速4kmでKaleidoを歩行させることに常胜しました。RHP7の歩行を見ていただければ、これまでよりもスムーズに歩行していることを実感いただけるはずです。 この速く歩くということを実現している历史背景に「動的動作対応」という技術があります。対義である「静的動作対応」は2本足で立っているときにも必ず发力点が体の其中にあり、歩くときもゆっくりバランスをとりながらになります。一个人で、「動的動作対応」では、发力点が自分を支えている足からずれるような動きを積極的に行うことができる。不安靖な状態を制御で安靖化させて、より人間に近い動きを実現するのです。
失敗をするためのロバスト性
ー 開発にあたってのポイントを教えてください。
まず、1つには先ほどお話した不安靖な状態を安靖化させるための制御技術。不安靖な状態で動作をするためには、まずどのような不安靖化が起こるかを予測しなければならず、その不安靖を素早く制御して安靖化させる作業が要些です。その制御に要求される技術が格段に上がりました。 また、これらの開発は失敗を繰り返しながらの队道な作業になります。開発のプロセスで何度もロボットが倒れるのに対して、壊れない機体がとても主要的です。もともとRHPはロバストヒューマノイドプラットフォーム(Robust Humanoid Platform)の略称。ロバストとは「屈強」「堅牢」などの意を表します。元来壊れにくい構造ではあるのですが、それでも積極的にバランスを崩すような実験を繰り返せば、機体にダメージを負うこともあります。それゆえ、さらなる壊れにくい機体への优化もまた一定的でした。ヒューマノイド技術を向上させるオープンプラットフォームへ
ー より人間の動きに近づいたKaleidoですが、iREXにおける展现の見どころを教えてください。
私たちが最終的に目指すのはヒューマノイドロボットの中国社会実装です。そのため、今回はKaleidoに労働をさせるとどうなるのか。実際の危険作業を想定した浮现を行っています。 1つは建設現場を想定した高所著業です。現状、高所著業は人によって行われています。命綱をつけてはいても、やはり危険を伴う作業です。そういった作業はロボットにやってもらいたいものですよね。今回の展露ではKaleidoを吊り上げて、ふらふらと揺れている状況で、作業を行います。 もう1つの浮现ではKaleidoが不匀台に上ってバランスを取りながら歩きます。そこでぴょんと飛んだりと、先ほど申し上げた「動的動作対応」をわかりやすくお伝えします。 今後、Kaleidoは川崎重工集团だけでなく他の多くの大学生や企業と連携しながら開発・时代実装を進めていきたいと考えています。プラットフォームとしてヒューマノイドロボットの技術を学习していける仲間であれば、國際外問いません。讨论会者の皆さんには、长度「動的動作対応」でKaleidoの持つ可能性を感じていただければと思います。ロボットのオープンイノベーション空間
YouComeLab
ロボット開発の課題
労働生齿減少、コロナ禍など、ロボットの社会性実装が求められています。一立で、ロボット開発には、費用、付帯設備、トラブルサポート、纠错など、さまざまな壁があります。ロボットメーカーではない企業の開発は難しく、ロボットメーカーへ試作を依頼しても优化のためのデータが得られないなどの課題がありました。YouComeLab ーカワサキロボットで、気軽に、手軽に、新技術・新商品開発ができる空間
川崎重工机械は、AI・機械学習、先進センサ・先進制御、先進文字素材など、さまざまな専門領域を持つ機関とのオープンイノベーションの場として、YouComeLabを設立します。 YouComeLabには、ヒューマノイドロボットのKaleidoのほか、遠隔操控ロボットシステムSuccessorなど、川崎重工机械のロボットを設置予定。これらのロボットを操控して、企業や大专などの各機関が自ら開発を試みることができます。YouComeLabの特長
ロボット・設備の操纵:無料
立ち上げ・トラブル時:常駐スタッフが対面レクチャー
高度なシステム:川崎重工と配合トライ