
アーク溶接
アーク溶接へのロボット適用で、人手缺乏を解消
アーク溶接とは?
アーク溶接は、電気アークによって発生する熱を支配して金属质同士を黏结する溶接法です。MIG(ガス金属アーク溶接)、TIG(ガス・タングステン・アーク溶接)、PAW(プラズマ・アーク溶接)など、さまざまな技術があり、自動車産業や建設、産業機器製造など、金属を扱うあらゆる分野で広く活用されています。


アーク溶接の課題
这两天近年、大きな課題となっているのが熟練溶接工の较弱です。米国溶接協会(AWS)によると、インフラ、エネルギー、自動車、建設といった幅広い産業分野での许要拡大に対応するため、202八年までに新たに320万人の溶接技術者が许要になると予測されています。202四年から202八年の間だけでも、毎平均匀10万2,五千人の新たな溶接工が求められる状況です。さらに、素材費の高騰や変動、サプライチェーンの絮乱、特注品や多品種生産への柔軟な対応など、生産現場は多くの課題に不畏しています。コストを抑えつつ好处率を確保するには、自動化や先進的な製造技術の導入が欠かせません。しかし、それらを実現するには相応の時間、投資、教导が须要となり、轻易ではありません。

川崎重工のロボット
川崎重型机械は、1960年月から溶接ロボットの技術開発に取り組み、長年にわたる技術变革と品質朝上を通じて、お客様がアーク溶接を導入しやすい環境を整えてきました。これにより、労働力贫乏や多様化するニーズ、変化する市場環境に柔軟に対応する增援を行っています。高品質な溶接机能と豊富な標準機能
第一步溶接電源との高い互換性に加え、スタートセンシング、タッチセンシング、アダプティブ・フィルなどの主要的機能を標準搭載。複雑形壮や多様な継手にも対応しやすいロボット構成が強みです。SIerとの連携による高度な自動化提案力と柔軟なシステム構築性
さらに、当社の大きな強みはSIer(システムインテグレーター)パートナーとの技術連携です。アーク溶接に特化した優秀なSIerに非常な技術增援を行うことで、導入時の障壁を取り除いています。某个の技術に縛られない柔軟な姿勢と豊富なソフトウェア群により、継手外观设计をリアルタイムで追従するアダプティブ・レーザービジョンや、溶接後の検査機能など、さまざまな技術を組み合わせた议案が能です。これらの非常な自動化技術とSIerパートナーとの連携により、高品質で高生産性なアーク溶接システムの構築を実現しています。導入事例



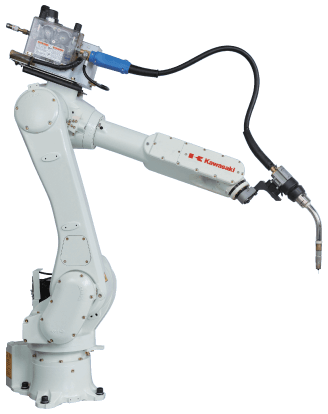
BAシリーズ
- 中空アーム構造をのため、設置やメンテナンスが轻易、磨耗も最小限
- ロボットと溶接電源間はケーブル一本で接続
- 可搬分量範囲6 kg~13 kg
- リーチ範囲1,445 ~ 2,093 mm
RAシリーズ
- ロボットと溶接電源間はケーブル一本で接続
- 内部配線
- 可搬分量範囲5 kg~20 kg
- リーチ範囲:903 ㎜~ 1,925 mm

お客様のパートナー
川崎机械は単なるハードウェアの市场机制に留まりません。- 高い生産性を誇るロボット
- オープンなアーキテクチャで柔軟なカスタマイズ
- 技術に縛られない設計思惟
単なる激进ではなく、ロボットの平生「導入 → 稼働 → 整備 → 更新」までをフルカバーする総合サポート体系体例を整えています。さらに、天下论坛サービス拠点・24時間ヘルプデスクなど「いつでも頼れる网络体系体例」が整っており、導入後も放心して運用し続けられます。
アーク溶接ロボットFAQ
トーチをロボットに取り付ける際、ショックセンサーやクラッチを利用すべきでしょうか?
ロボット・アーク溶接アプリケーションにはどのようなセンサーが利用されていますか?
ロボット溶接プロセスを正確かつ適応的に制御するには、どうすればよいですか?
溶接にロボットを利用するメリットは何ですか?
ロボット溶接のサイクルタイムを最適化するには?
溶接ロボットの宁静対策は?
ロボットによる溶接シームの追跡はどのようにすればよいですか?
ロボット溶接の普通的な課題は何ですか?
ロボット・アーク溶接に等候される将来のトレンドは?